Next Drone Operations
ロボット操縦士、
始動。
人の操縦技能をロボットへ継承し、より安全に、より標準化され、よりスケーラブルな次世代ドローン運用を実装していく。
それが、HoneyBee Techの挑戦です。

人の操縦技能をロボットへ継承し、より安全に、より標準化され、よりスケーラブルな次世代ドローン運用を実装していく。
それが、HoneyBee Techの挑戦です。
熟練操縦者の判断と技能を形式知化し、ロボットへ継承する。
人的リスクを抑え、危険環境でも持続可能なドローン運用を目指す。
属人的な操縦から脱却し、再現可能でスケーラブルな運用基盤を実装する。
HoneyBee構想は、ドローン操縦を人からロボットへ継承し、次世代の運用基盤へ進化させるための構想です。
自動飛行の再現性と、人間操縦の柔軟な判断力。その両方を実装するために、HoneyBee Techは制御・認知・判断機能の一部を機体外へ分離・集約する、オフボード型AI飛行制御の研究開発を進めています。
目指しているのは、単なる自動化ではありません。熟練操縦者の技能を再現可能なかたちへ変換し、より安全で、より標準化され、よりスケーラブルなドローン運用を社会実装していくことです。
Tower-Droneアーキテクチャは、HoneyBee構想を実現するためのシステム構成です。
ドローン本体に内蔵されていた制御・認知・判断機能の一部を、機体外の装置「TOWER」へ分離・集約することで、安全性・信頼性を維持しながら、機体の軽量化、小型化、積載量向上を目指します。
これは、ドローンにすべてを載せ込む発想から、機体と外部知能を分担させる発想への転換でもあります。

TOWERは、Tower-Droneアーキテクチャにおいて、機体外で制御・認知・判断を担う中核装置です。
人が担ってきた操縦判断や状況把握の一部をロボットとして引き受け、ドローン運用をより安全で、より標準化され、より拡張可能なものへ進化させます。
TOWERは固定設備に限らず、状況に応じて移動可能な存在としても構想されています。
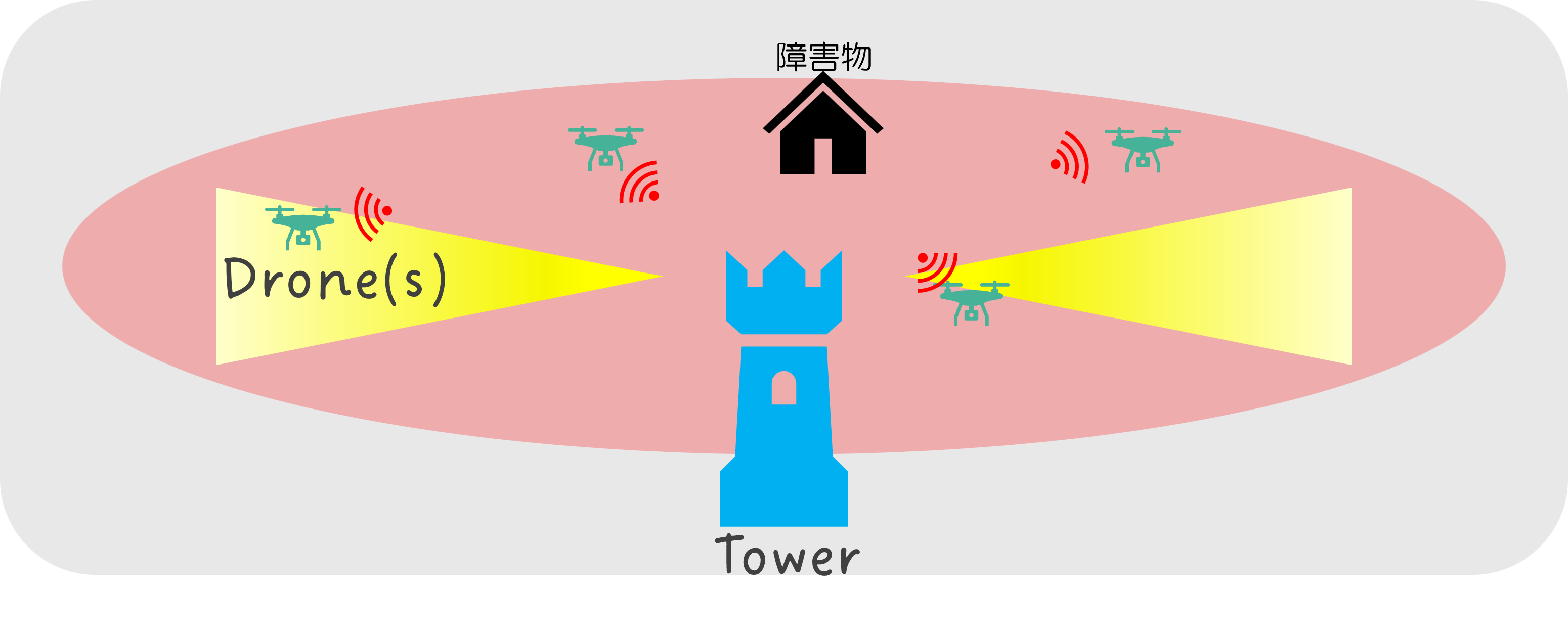

移動可能なTOWERとドローンの協働イメージ

複数機体へ拡張される将来の運用イメージ
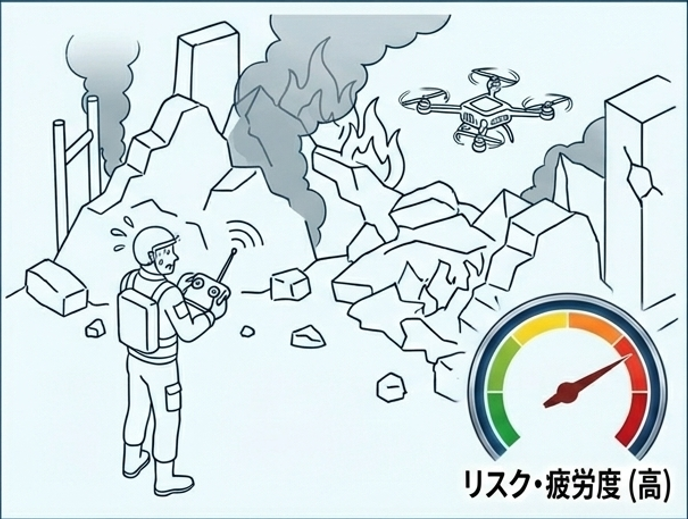
危険環境での運用負荷を下げ、人が立ち入れない現場でも持続可能な活用を目指します。
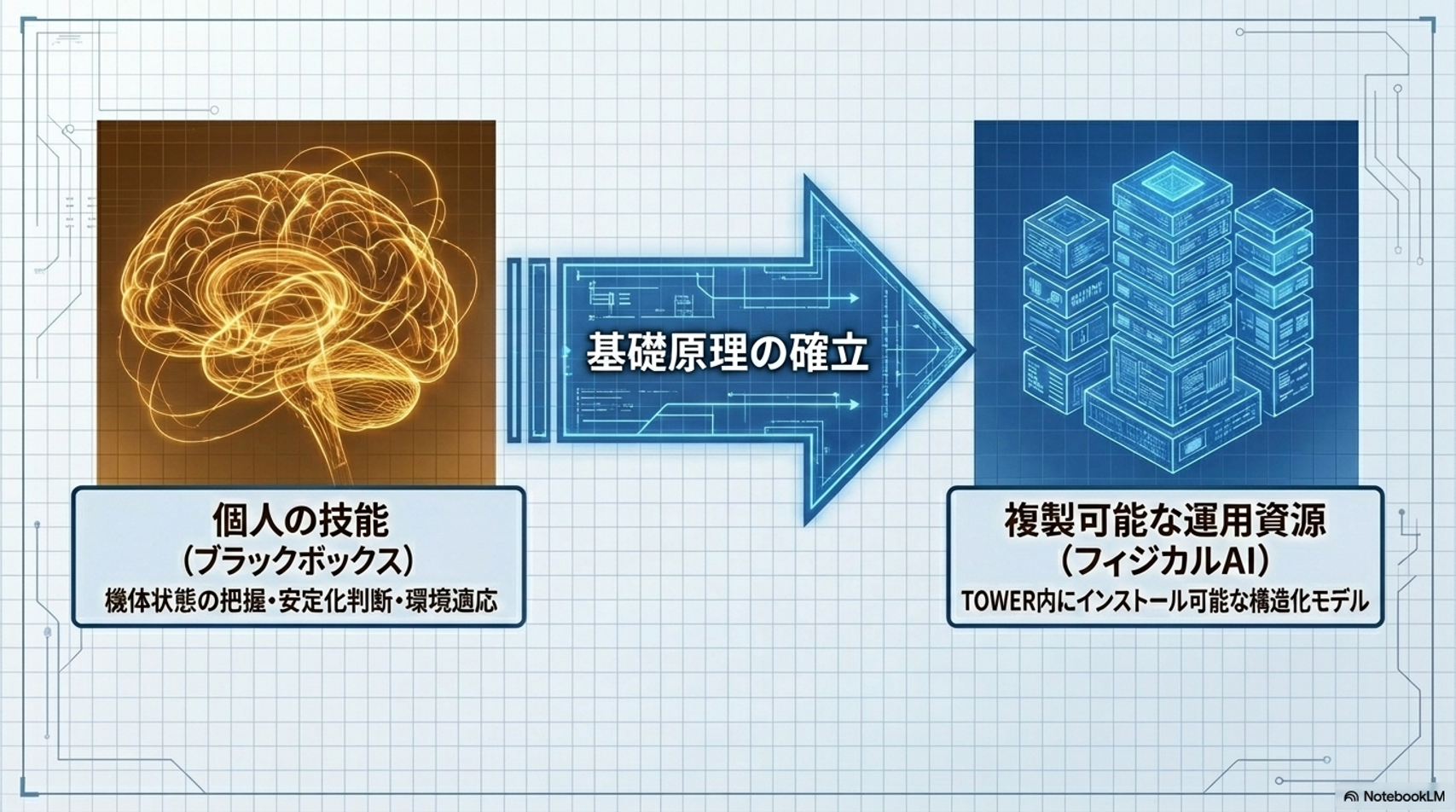
熟練操縦者の技能を再現可能な形へ変換し、人に強く依存しない運用基盤をつくります。
複数機体・複数現場へ展開可能な、標準化されたドローン運用の実現を目指します。
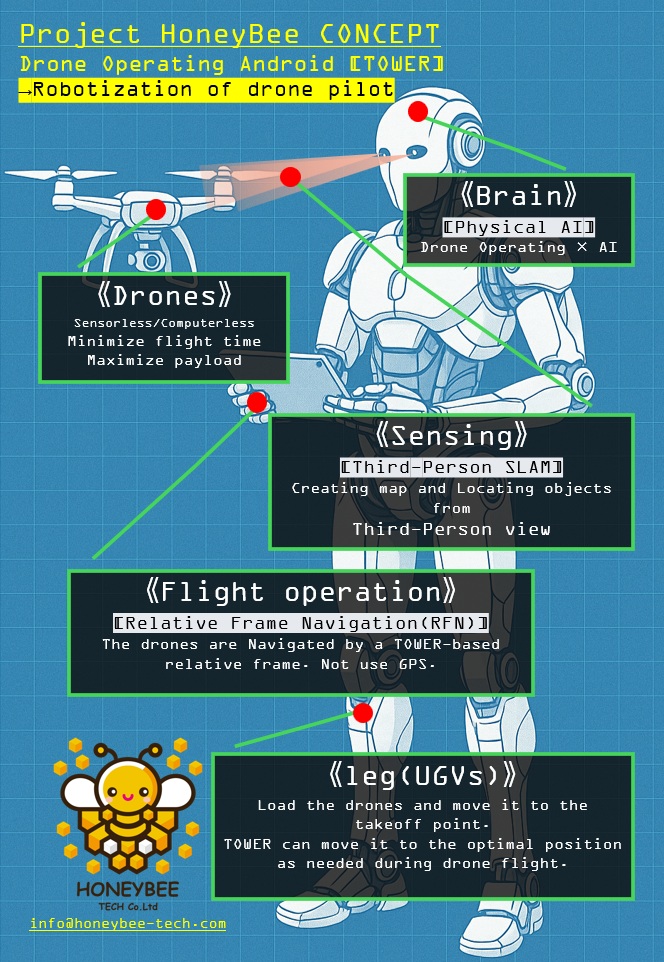
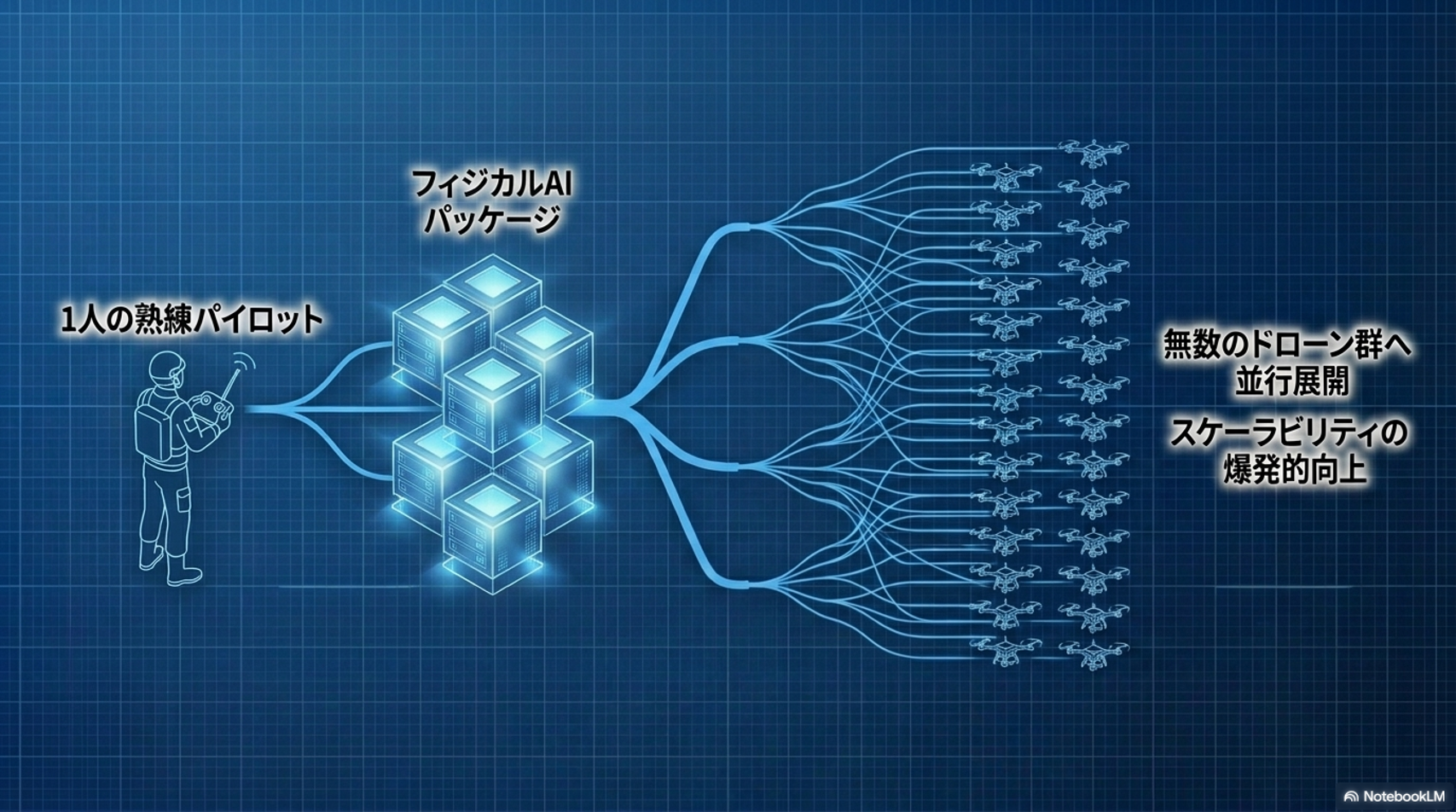
HoneyBee Techのロボット操縦士は、3つの要素技術の上に成り立っています。第三者視点で「見る」、外部から「安定化する」、相対座標系で「導く」。その基盤を統合し、熟練操縦者の判断を外部知能として実装するのが Physical AI です。
TP-SLAM、TP-Positioning、RFNという3つの要素技術を統合し、人が担ってきた挙動監視、微調整、判断、操作の一部をロボットへ継承する知能基盤。HoneyBee Techが目指す「ロボット操縦士」を成立させる上位レイヤーです。
第三者視点から、ドローンの位置・姿勢と周辺環境のマップを同時に推定する技術。機体側に高価な自己航法センサを搭載せず、TOWER側で認識と位置推定を担います。
第三者視点の情報から、ドローンの姿勢を保持し安定化する技術。外部センサが機体の挙動を常時観察し、TOWERが補正指令を生成することで、人が目視で行っていた微調整を外部制御として再構成します。
TOWERを基準とした相対座標系に基づき、ドローンを制御する航法。絶対座標ではなく、TOWERを中心とした相対座標フレームで飛行を導くことで、非GNSS環境でも柔軟な運用を可能にします。
制御ソフト、IoT、Webシステム、PM支援などを通じて、ロボティクス領域の開発を支援しています。
受託開発で得た知見と収益を基盤に、HoneyBee構想の研究開発と段階的なPoC・実運用試験を推進しています。

ソフトウェア開発、ITコンサルティング、ロボティクス導入などを横断してきた経験を基に、HoneyBee構想を着想し、これを実現すべくHoneyBee Techを立ち上げました。
構想をアイデアで終わらせず、実装し、社会に届けることを目指しています。
HoneyBee構想への共同研究・投資・
受託開発のご相談など、お気軽に。
info@honeybee-tech.com
〒140-0005
東京都品川区広町1-5-28
広町工場アパート402